2022.01.30修订
3D Transform 三维变换
基本原理和二维变换一致
齐次坐标定义
齐次坐标下的点和向量定义:
- 点:(x,y,z,1)
- 向量:(x,y,z,0)
一般的,w=0的一个点,它也表示三维坐标的点:(wx,wy,wz)
更进一步,对齐次坐标下的点乘以任何一个非0的数,它还是表示同一个点
(1,0,0,1)=(2,0,0,2)
仿射变换
仿射变换使用的齐次坐标下的矩阵:
x′y′z′1=adg0beh0cfi0txtytz1xyz1
第4行永远是0001,平移还是在第4列,左上角围成的3x3矩阵就是三维空间中的线性变换使用的矩阵
和二维一样,仍然先应用线性变换,再加上平移变换
缩放矩阵
sx0000sy0000sz00001
平移矩阵
100001000010txtytz1
旋转矩阵
Rx=10000cosθsinθ00−sinθcosθ00001
Rx=cosθ0−sinθ00100sinθ0cosθ00001
Rz=cosθsinθ00−sinθcosθ0000000001
稍微复杂一些,三个矩阵都是绕着坐标轴旋转
观察一下可以得知,绕x轴转的时候,x是不变的,所以Rx第一行和第一列是1,0,0
绕z轴转的时候一样的
绕y轴旋转的时候,发现它是反过来转的,因为根据右手螺旋定则,x×y得到z,那x×z也可以得到y

正好和y轴反过来
使用三个简单旋转矩阵可以组合出任意旋转
罗德里格斯旋转公式
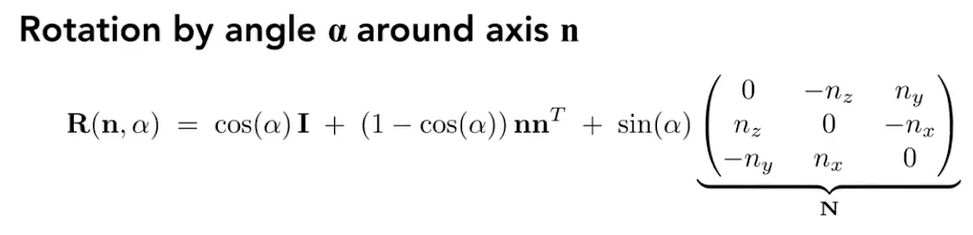
n表示旋转轴(默认旋转轴过原点,n是方向),旋转轴需要起点和方向,这里默认起点在原点上,α表示旋转角
后面大括号的矩阵N,它其实是叉乘
非要绕任意轴转,那就先把它移到原点,再移回去
Viewing transformation 观测变换
为了将三维空间中的物体像照相一样变换到二维,我们需要进行观测变换。观测变换包括模型(Model),视图(View),投影(Projection)变换。这一系列变换的矩阵就是MVP矩阵。
找个好角度放摄像机(确定摄像机位置方向)
首先定义个相机
- 位置(Position)e
- 相机往哪看(LookAt/Gaze Direction)g
- 向上的方向(Up Direction)t
拍照的时候,如果周围物体和相机一起做相同的运动,那么拍出来的图也一定不会变化,它们在做相对运动。
既然如此,我们定义:
- 相机永远不动,而且位于坐标原点
- 相机永远往-z方向看
- 相机永远以y轴为向上方向
现在我们要使用矩阵的组合让相机符合定义,也就是:
Mview=RviewTview
将摄像机位置e平移到原点,可以写出平移矩阵T
Tview=100001000010−xe−ye−ze1
接着将g旋转到(0,0,−1)方向,t旋转到(0,1,0)方向,g×t旋转到(1,0,0)方向
我们可以把这个过程看作:三个向量,同时乘以同一个矩阵,得到三个规范化向量
要将任意的向量旋转到一个规范化向量,不是很好写
但是如果反过来,将规范化的向量旋转到我们需要的方向上,例如把(0,0,−1)转到g方向上,就很好写了
写出来之后再使用逆变换,也就是求它的逆矩阵,就得到了我们需要的Rview,正好旋转矩阵还是个正交矩阵,逆矩阵等于转置矩阵
所以可以构造一个逆矩阵
Rview−1=adg0beh0cfi00001
它乘以(1,0,0,0)要得到g×t
adg0beh0cfi000011000=xg×tyg×tzg×t0
很容易解得:
⎩⎨⎧a=xg×td=yg×tg=zg×t
同理,将三组向量分别求出来,最终得到的结果带回矩阵:
Rview−1=xg×tyg×tzg×t0xtytzt0x−gx−gx−g00001
再转置一下:
Rview=(Rview−1)T=xg×txtx−g0yg×tyty−g0zg×tztz−g00001
其他所有物体要和相机一起做这个变换,保证物体相对位置不变
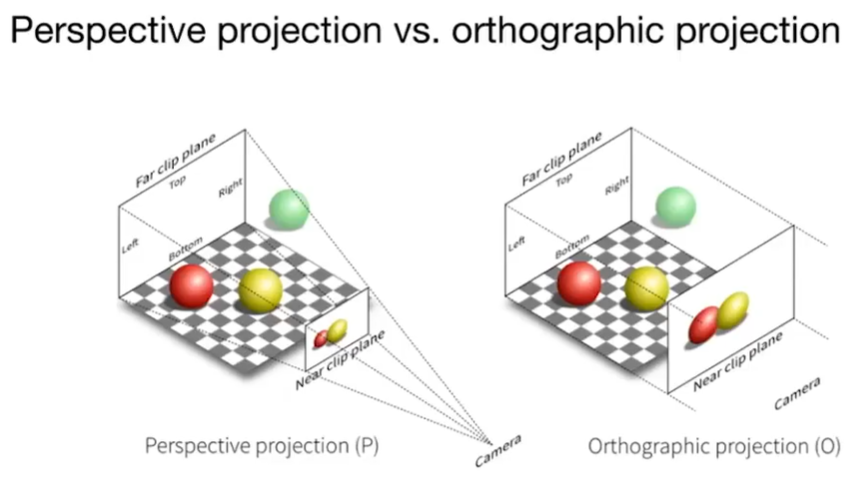
投影变换分为正交投影(Orthographic)和透视投影(Perspective)。正交投影中,互相平行的线,投影完后它们还是平行的,而透视投影会逐渐靠近交汇到一起。再简单来说,透视投影近大远小,正交投影是多大就是多大,不会因为摄像机的距离改变。(但是鸽子到底为什么这么大呢.jpg)
Orthographic Projection 正交投影
- 把摄像机摆好(原点,看向-Z,向上是Y)
- 扔掉Z坐标
- 现在坐标只剩x和y,把坐标按比例缩小到[-1,1]²的矩形内(方便之后的计算)
在空间中划出一块长方体区域,将它映射到一个标准立方体(canonical cube)中
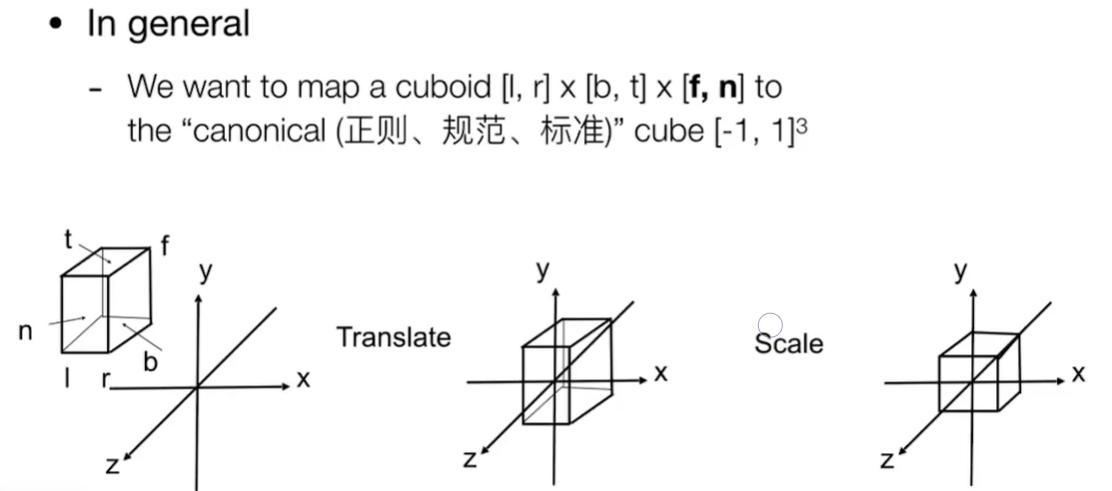
也就是先把长方体中心移动到原点,再将它缩放,很容易将变换写成矩阵形式
Mortho=r−l20000t−b20000n−f200001100001000010−2r+l−2t+b−2n+f1
需要注意的是,右手坐标系中,划分的长方体区域其实是近大于远(n>f),因为摄像机看向-Z方向,z轴值更大的其实离相机更近
Perspective Projection 透视投影
欧几里得规定,两条永不相交的线是平行线,但是现实的照片中,两条平行线会相交于一个点。在一个平面中(比如同时垂直于两条线的平面),平行线当然是平行的,但它们被投影到另一个平面中时,就不一定了
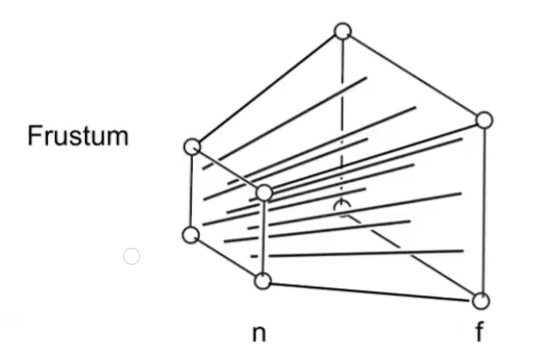
类比正交投影,也要划分一个范围。从一个点延伸出一个四棱锥,定义近的面(n)和远的面(f),n面比f面小
发现它和正交投影的区别仅仅是远的面更大
我们先将透视投影的这个四棱锥给挤压成长方体,再应用正交投影矩阵,问题就解决了
挤压的规则我们规定:
-
近平面(n)上任何一个点永远不变
-
除近平面的面,其他任何点在挤压过程中z轴坐标不变
-
远平面的中心点坐标不变
这样得到的挤压方法就是唯一的
为了挤压四棱锥,我们从四棱锥侧面看它
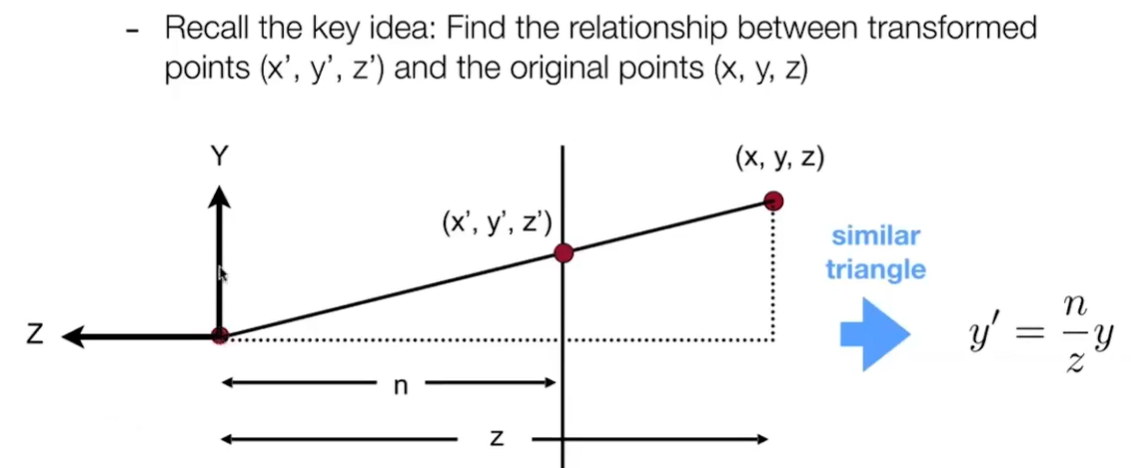
现在有近平面上的点(x′,y′,z′)和远平面上的点(x,y,z),根据挤压规则,最后远平面上的点的y会和近平面y′相等
而且(x′,y′,z′)和(x,y,z)构成了相似三角形,而n和z我们都知道
可以使用相似三角形得出y与y′的关系:
yy′y′=zn=yzn
类似的,任意一个平面(在近远平面内且平行于两平面的面)中的点的y值都可以通过相似三角形来计算。
而且x方向上的挤压也是同一个道理
我们可以得到:
x′y′=xzn=yzn
齐次坐标下的点坐标变化我们就可以写出来了
xyz1→znxznyunknown1=nxnyunknownz
现在我们还不知道z如何变化,所以写成unknown
一个坐标经过矩阵变换,变成了另一个坐标
Mpersp→orthoxyz1=nxnyunknownz
我们可以反推出矩阵的部分元素
Mpersp→ortho=n0?00n?000?100?0
如何求出第三行呢?这一行和z有关
观察四棱锥体,我们发现:
- 任何一个点在近平面上的z都不会发生改变
- 任何一个点在远平面上的z都不会发生改变
本来近平面上的点的z分量全部都是n,而且近平面无论如何映射都不会动
利用这一点,我们可以写出近平面的点的映射:
Mpersp→orthoxyn1=xyn1=nxnyn2n
根据映射,可以看看矩阵里的哪些值可以求出来了
n0C00nD000A100B0xyn1=nxnyn2n
可以将第三行单独列出来
(CDAB)xyn1=n2
结果中不存在x和y,所以C和D直接等于0
(00AB)xyn1=n2
所以根据近平面上点的特点可以列出方程:
nA+B=n2
远平面上点的特点是一样的,我们可以找个特殊点,就是远平面的中心(0,0,f,1),同理可得:
fA+B=f2
两方程联立,可以解出
{A=n+fB=−nf
所以将四棱锥体挤压成长方体的矩阵是:
Mpersp→ortho=n0000n0000n+f100−nf0
Questions
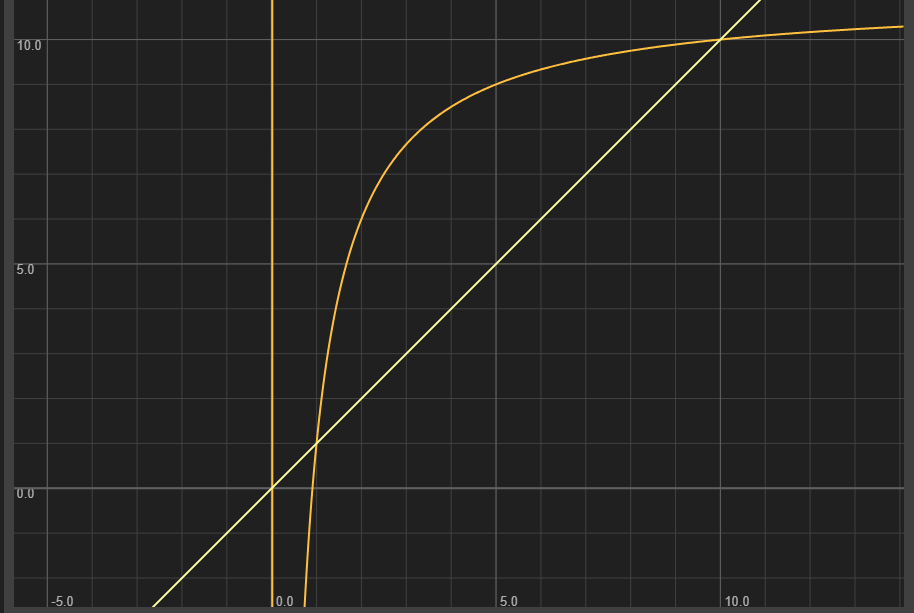
Q:挤压四棱锥的时候,近平面和远平面上的点的z值都不变,那锥体里面的点,z值是变大,还是变小,还是不变呢
A:根据矩阵第三行点乘向量,可以列出个式子
zz(n+f)−nf
化简一下会发现这是个反比例函数,取n到f这段,是单调递增的,所以中间这段的z值会被推向远平面
验证一下
假设n=0.1,f=100,现在有点(12,15,37),挤压后的结果是
Mpersp→ortho1215371=1.21.53693.737=0.0320.0499.82971
确实变大了,也就是说中间的点被推远了
总结一下

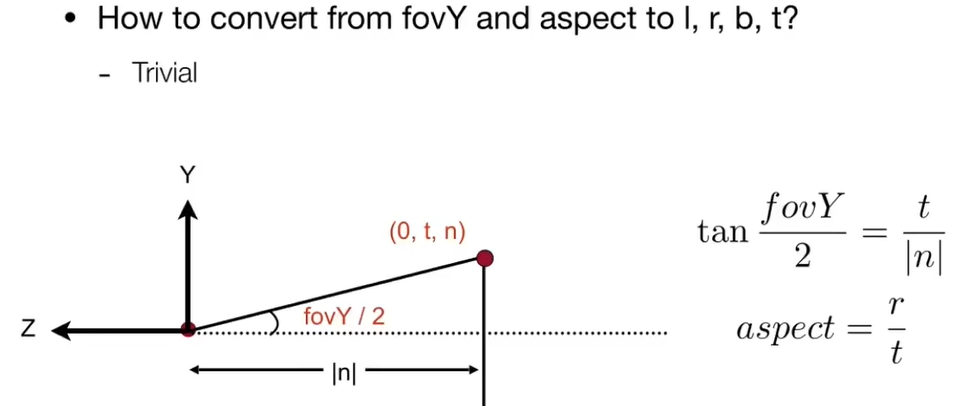
一般来讲,定义透视投影的视锥,先定义near和far。再定义一个宽高比(Aspect ratio)(就是宽除以高)。还会定义视界(field of view,fovY),可视角度比较大就是广角。
怎么算长方体已经很明确了,这里再总结一下把三个矩阵乘在一起的结果
Mpersp=MorthoMpersp→ortho=r−l20000t−b20000n−f200001100001000010−2r+l−2t+b−2n+f1Mpersp→ortho=r−l20000t−b20000n−f20−r−lr+l−t−bt+b−n−fn+f1n0000n0000n+f100−nf0=r−l2n0000t−b2n00−r−lr+l−t−bt+bn−fn+f100−n−f2nf0
再带入
tbrl=ntan2fov=−t=t×aspect=−r
最终的矩阵是:
Mpersp=tan2fov×aspect10000tan2fov10000n−fn+f100−n−f2nf0
顺便求一下视图变换矩阵:
Mview=RviewTview=xg×txtx−g0yg×tyty−g0zg×tztz−g00001100001000010−xe−ye−ze1=xg×txtx−g0yg×tyty−g0zg×tztz−g0RR1⋅TC4RR2⋅TC4RR3⋅TC41