[图形]着色
在将三角形光栅化后,可以把所有像素画在了屏幕上了,那么每个像素应该是什么颜色,就是着色要解决的问题。
词典里对着色的定义是:引入明暗或颜色变化的过程。
图形学上的着色也差不多,只是换成了将材质应用到物体上的过程。不同材质与光线会有不同的相互作用的方法。
Blinn-Phong Reflectance Model
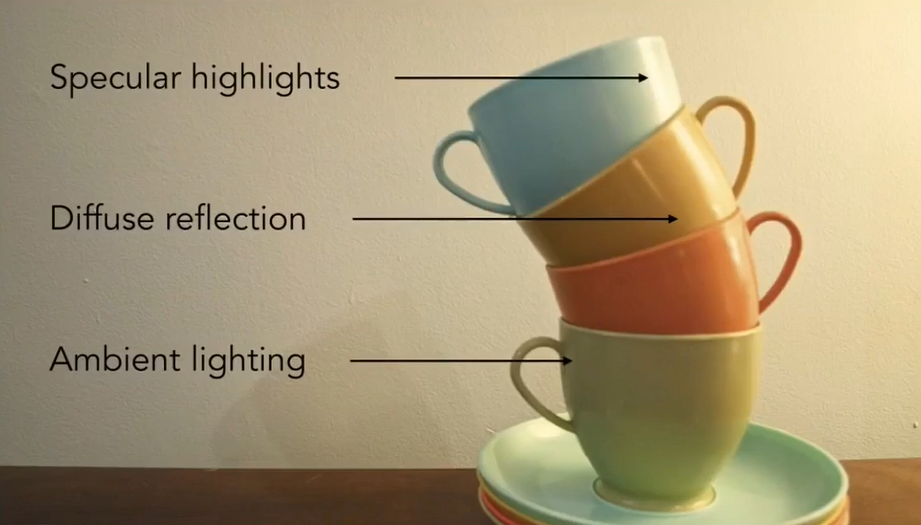
现实中,物体可以被观察,是因为人眼接收了从物体来的光线。一般这些光线可以分为三种:
- Specular highlight 高光
- Diffuse reflection 漫反射
- Ambient lighting 环境光
我们把这三个光线结果叠加起来,就是Blinn-Phong反射模型的结果。
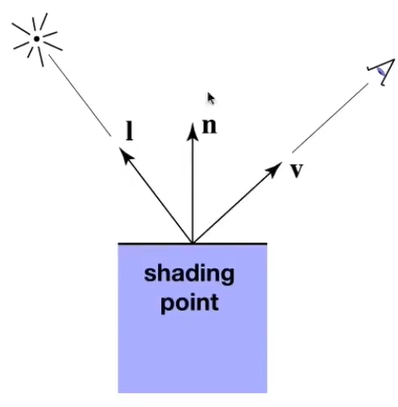
这里考虑的光照,都是考虑某一个点的光照结果,这个点叫做 Shading point 着色点。对于一个着色点,它一定在物体表面。此外,我们认为在物体表面局部很小的区域,它是个平面。
关于着色点的一些定义:
- n向量表示这个平面的法线方向(Surface normal)
- v向量表示这个着色点到摄像机的方向(Viewer direction)
- l向量表示这个着色点到光源的方向(Light direction)
- 以上向量都是单位向量
- 还有着色点本身的属性,它和物体表面有关,比如颜色、光滑度
此外,着色是局部性的,我们只考虑着色点自己的属性,不考虑这个点和其他物体联动的情况,例如阴影。
Diffuse Reflection 漫反射
当光线射到一个点上后,光线会被均匀的反射到各个不同的方向。
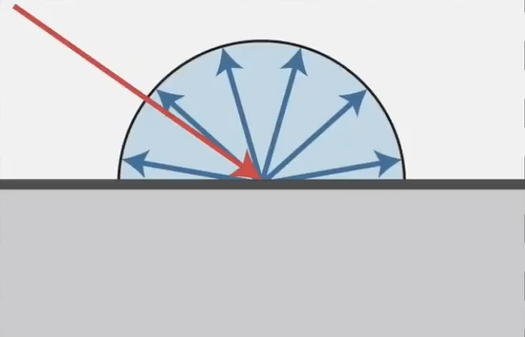

但是不同的入射角度,结果的明暗是不同的。相同的光线射入同一个点,为什么入射角度可以影响结果?
不同的角度,能反射的入射光线量不同。更科学的解释是,相同表面积,接收到的能量不同,夹角越偏接收能量越少,反射的能量越少。
Lambert余弦定理(Lambert’s cosine law):cosθ=l·n。着色点接收到的能量,和 入射光线与着色点法线方向的夹角的余弦值成正比。
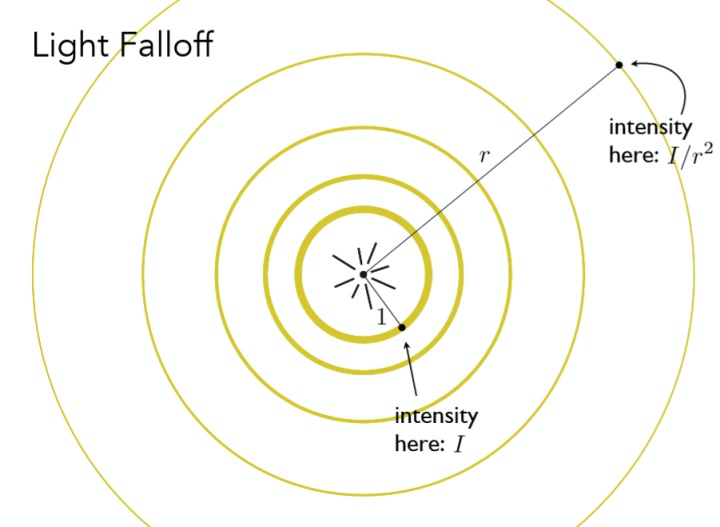
光线传播速度固定,光线总能量固定,假设n个以光源为球心的球壳将光源包围起来,那么任意时刻,任意一圈球壳代表的光线总能量不变,而球壳表面积在增大,则单位面积的光线能量减少。所以假设光源的光线强度是I,那么任意位置的光线强度就是I/r²

所以可以得到漫反射公式:到达的光线能量乘以接收的能量。需要注意的是,接收的能量,如果计算结果是负数,说明光线从内部过来的,所以直接将它置0。
众所周知,物体能呈现不同颜色是因为能吸收那种颜色,反射其他颜色,不同材质的反射率不同,所以定义一个漫反射系数kd,范围是0到1,1表示完全不吸收光线,0表示吸收了所有光线。
这个漫反射着色叫做Lambertian (Diffuse) Shading,从公式中可以看出,着色结果和摄像机方向无关,因此从任意角度观察物体,漫反射的结果都应该是一样的。
Specular Highlight 高光
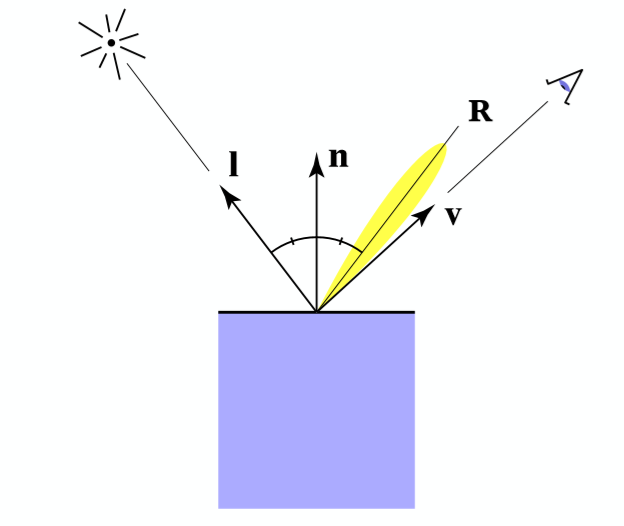
假设有个无限光滑的平面,那么我们很容易求出入射光线镜面反射的角度。如果这个平面不是那么光滑,那么我们也可以知道光线沿着镜面反射的散布。那么,当观察角度和镜面反射接近的时候,我们就能看到高光,也就是v和R接近。
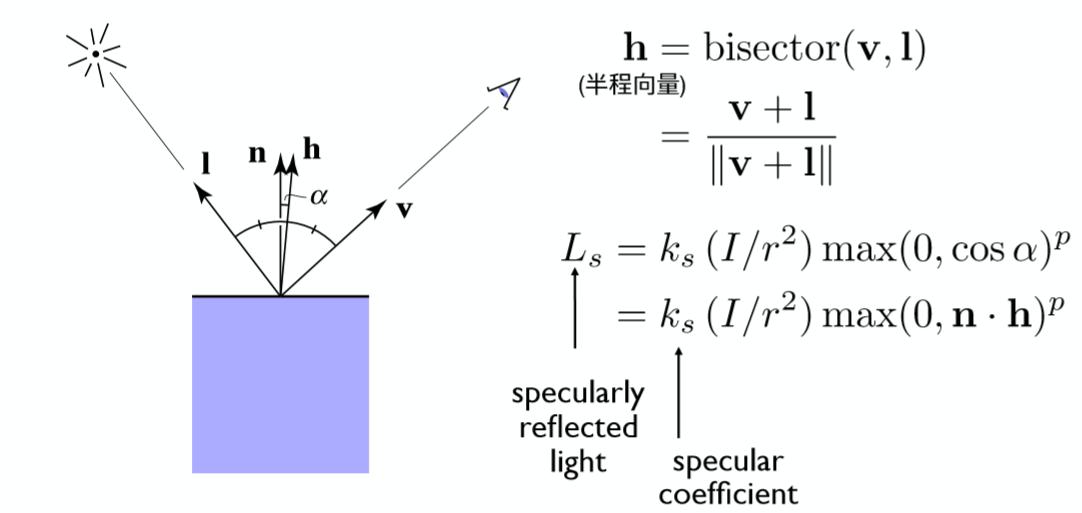
Blinn-Phong模型使用了一个很聪明的办法,求出l和v的半程向量h(就是四边形法则,中间那个向量),再将h归一化,所以能不能看到高光,只要看n和h是不是接近(也就是n点乘h结果是不是接近1)。
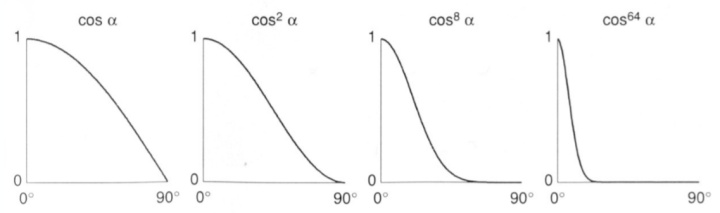
还有需要注意的一点,计算n和h夹角时有个指数p,事实上如果p等于1,就能看到一个超大的高光点,这不符合直觉,所以增加一个指数,让高光快速衰减。
当然,我们也可以算v和R(就是反射)的夹角,这样就变成了Phong模型。其实这两个模型只是计算起来容易程度的关系,本质没有啥变化。
我们会发现这里,Blinn-Phong模型并没有考虑高光点的能量吸收,因为这个模型其实是从经验中总结的,因此将它简化掉了,这里保证了能不能看到高光。
Ambient Lighting 环境光

想象一下,场景中只有一个光源,在场景中放个球,按理来说,球的背面无法接收任何光线,背面应该是全黑的,但是实际生活中,我们还是能看清背面的。其实这是环境光在起作用。环境光从四面八方射到球的背面,这是个非常复杂的过程。为了简化这个过程,我们假设,任何一个点接受的环境光都是相同的,叫做Ia,ka是环境光的颜色。环境光是个常数,和法线啊观察角都无关,它只是用来保证没有地方是完全黑的。
这里的环境光是假的,是特技,精确计算环境光需要全局光照(Global Illumination)
Shading Frequencies 着色频率
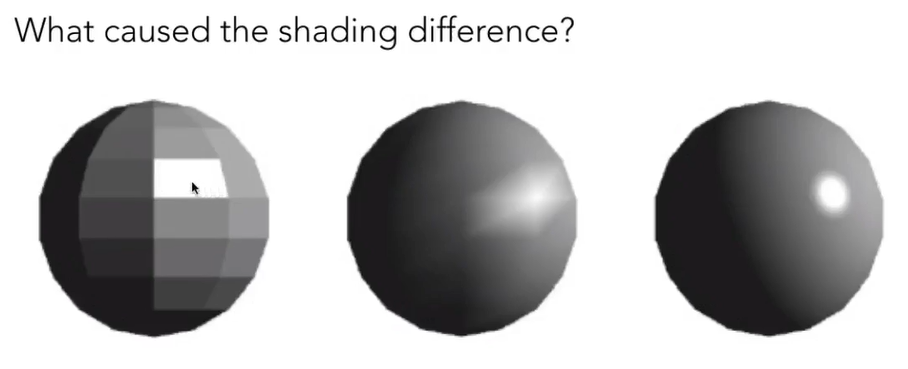
这三个球都是一模一样的模型,一模一样的光照模型,只是它们的着色方法不同
Flat shading
对三角形求面的法线(三角形两条边叉乘结果就是法线),算出面的着色结果,并将结果应用整个面上。
Gouraud shading
求每个顶点的法线,知道了每个点的颜色,就能对面的颜色进行插值。
但是如何算顶点的法线?如果物体是个球,我们确实可以很容易算出每个点的法线就是球心连到这个点的方向。但是大部分情况物体都不是球。实际上就算不是球也很简单,直接对包含这个顶点的面的法线求个平均,就是顶点的法线。(其实这也是个近似,万一相邻有个超大和超小的面,那求平均的时候加权一下,也许会更好)
Phong shading
Gouraud shading可以算出每个顶点的法线,在三角形中也可以插值出任意一个点的法线方向,那么就可以对每个像素应用着色。

其实这些着色模型各有优势,并没有谁比谁好。
Texture 纹理
在现代GPU中,纹理是一块保存在内存中,可以范围查询的数据,因此纹理不仅仅是图片,可以称为纹理的太多了。
- 环境光照(Environment Map):把来自任何方向上的光照(直接光,间接光)记录在纹理上。假设光源无限远
- Spherical Map:将环境光照记录在球上,并且可以展开。但是展开的时候有点小问题,上下两边的纹理是会被压缩的
- Cube Map:把光照信息存在立方体表面上,就解决了球面的问题。正方体六个面保存六张图片
- 凹凸/法线贴图(Bump/Normal Map):定义纹理上的点的相对高度,高度变化->法线变化->着色结果变化
- 位移贴图(Displacement Map):真的移动顶点位置,法线贴图是假的,顶点没有移动,在模型边缘会露馅
- 3D Procedural Noise:定义空间中任意一点的值
- Ambient Occlusion texture map(环境光遮蔽贴图)
Texture Mapping 纹理映射
现实生活中,一个物体不同地方的漫反射系数都是不同的,我们希望模型的不同位置都能自定义不同的属性。
一般纹理是一张图片
任何一个三维物体表面都是二维的
所以我们可以把任意一个三维物体的表面展开成一个二维平面。同样的,一张纹理我们也可以把它蒙到任意一个三维物体上。那么表面和纹理的坐标之间就有一种一一对应的映射关系。
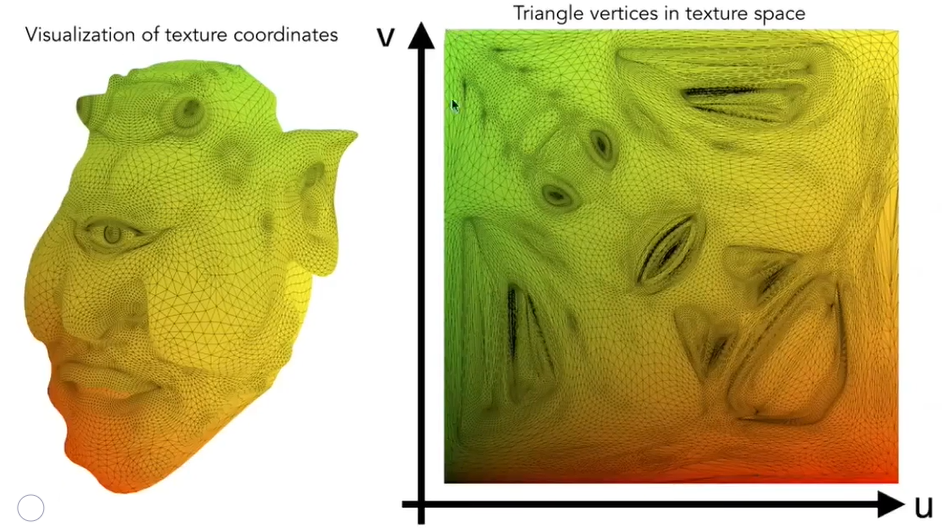
这图有点阴间
在纹理上,我们也会定义一个坐标系,叫做纹理坐标(Texture Coordinates),通常用u、v来表示,uv的范围是[0,1]
有些纹理是可以重用的,多个纹理拼接起来,它的左右或上下如果可以无缝衔接,这样的纹理叫做Tilable texture
Barycentric Coordinates 重心坐标
为了对三角形内的属性(什么属性都可以,纹理坐标啊、颜色啊、法线啊)进行插值,引入重心坐标的概念。

A、B、C表示三角形三个顶点坐标,分别乘以一个系数,而这三个系数满足和是1且三个系数都是非负数的时候,这三个系数组成的二维坐标(去掉z)可以表示一个坐标。

坐标系数α等于与A顶点不相邻三角形Aa除以三角形总面积。

如果将三角形面积按以上方法分成3等份,那么分割后的三角形交点就是重心坐标。
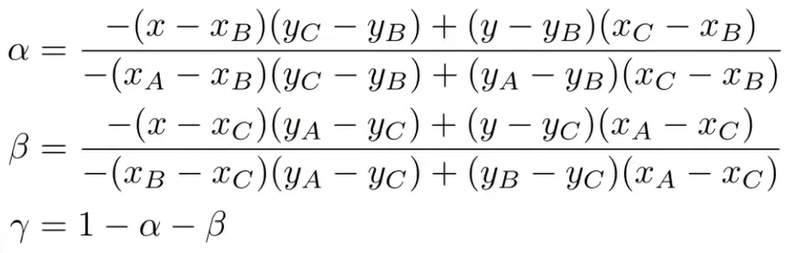
最终可以从面积计算推出重心坐标公式(怎么推的…
重心坐标有个小问题,在投影变换下不能保证投影后的重心坐标不变。因为投影后顶点坐标发生变化。如果投影完了再算一遍可能会法线重心坐标改变了。
使用重心坐标将三角形内的任意一个点插值出来后,就可以去纹理上采样坐标点对于的颜色是多少,然后把颜色值当作漫反射系数,就相当于把纹理贴在了物体上。
Mipmap
有时候纹理分辨率太小了,而查询的时候又只是简单的四舍五入找最近的点,呈现出来的画面就会出现一大堆锯齿。如果我们想让纹理平滑一些,需要引入双线性插值(Bilinear Interpolation)。
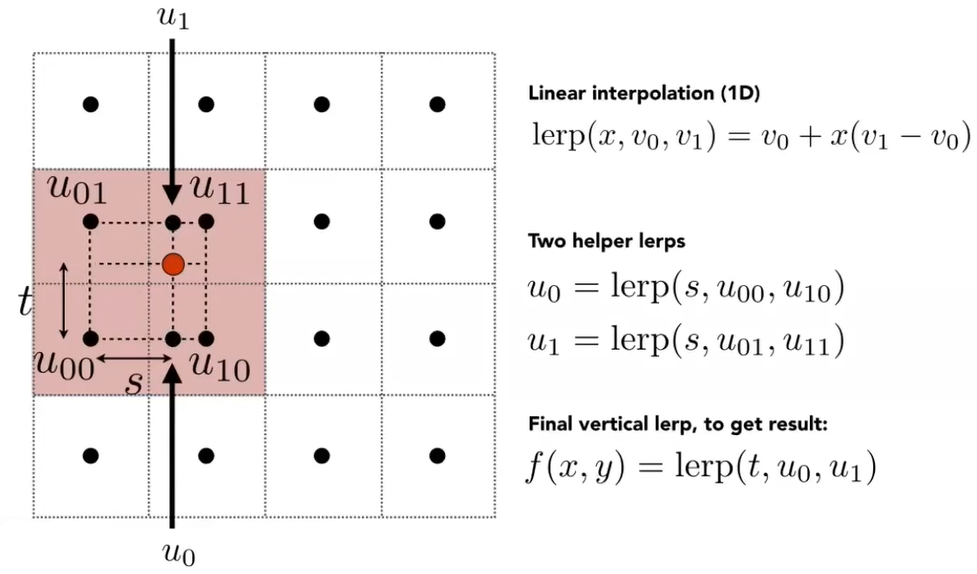
我们去找它临近的4个点,先对上下两行水平方向的像素进行插值,可以得到两个结果,再对这两个结果进行插值,就可以得到这个像素的值了。这个值综合考虑了周围像素的值。还有效果更好的插值方法Bicubic,这里就不细嗦了。

这是材质过大时,还按照简单的四舍五入取像素点的方法渲染结果,远处出现了摩尔纹,近处出现了锯齿。图像走样了,因为远处的物体渲染时,每个像素覆盖的材质都会更多,但是如果简单的用一个点代表一块区域,就丢失了很多信息。
解决方法也简单,采样更多的点就行了。但是会增加开销。
事实上走样的本质是变化速度过快,采样频率跟不上,超采样就是用更搞得采样频率。但是如果我们不采样,立刻就能知道一块确定区域的像素平均值是多少,岂不是更好。
为了解决这个问题,引入Mipmap。Mipmap可以快速查询矩形区域的像素值,使用mipmap进行采样叫做三线性插值。
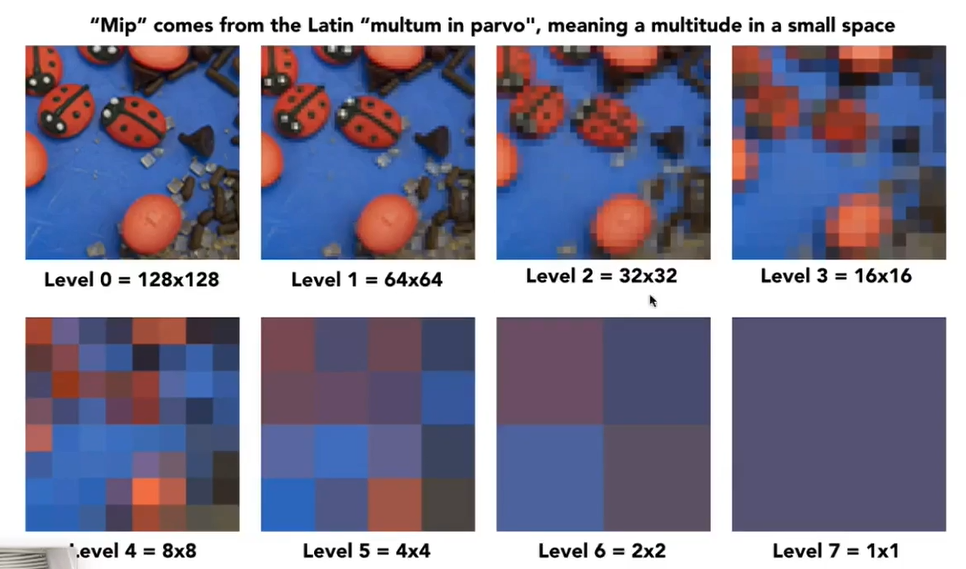
(其实就是缩小纹理分辨率,每次缩一半
第0层是原图,第一层小一半。储存空间增大到4/3,也就是说mipmap占了1/3。

如何使用mipmp?(TODO)
当将需要查询的区域近似成四边形后,查询哪一层区域约等于一个像素,直接获取那一个像素的结果,就可以立刻得出区域内平均值。
但是但是但是,如果查询结果在两层中间怎么办?插值。
Anisotropic Filtering 各向异性过滤
如果将超采样的结果作为标准,三线性插值的结果其实已经比较准确了,但是在某些情况下,远处的贴图还是糊的(Overblur),因为mipmap只是近似,而且只能近似四边形。各向异性过滤的结果比三线性插值更准确。各向异性过滤会生成Ripmap
(跳过,看不懂TODO)
Real-time Rendering Pipeline 实时渲染管线
我们现在知道如何光栅化物体,有了着色模型,知道了着色模型怎么用,现在将所有东西都合在一起,就已经可以得出渲染结果了。
这个从三维模型之类的数据,到得出渲染结果并显示出来的过程,就是渲染管线,这里说的是实时渲染管线(Real-time Rendering Pipeline)
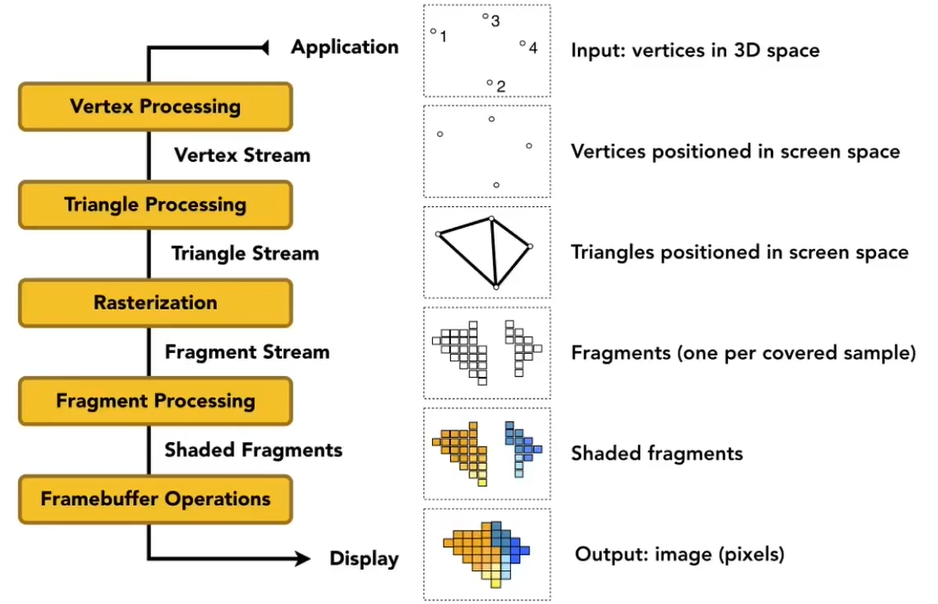
一套渲染管线基本可以抽象成5个步骤,这些步骤都被集合到了GPU里。
- Vertex Processing 就是顶点阶段,这个阶段会对输入的顶点进行各种矩阵变换。
- Rasterization 是光栅化阶段,这个阶段会产生一系列像素,深度测试也在这个阶段。
- Fragment Processing 是着色阶段,这个阶段能对每个像素颜色进行计算
事实上Shading可以应用在Vertex和Fragment阶段,并不只有像素阶段才能着色。现代GPU的顶点和像素阶段是可编程的,可以人工编程来控制这两项如何变化,而这个编写出来的程序就叫做Shader(着色器)
一般来说,Shader是用于GPU的一种硬件语言,Shader程序都会自动应用到所有目标对象上,不用手动遍历所有像素。